About Me

Marvin Cheng is a research engineer in the Center for Occupational Robotics Research at NIOSH. He is currently the Assistant Coordinator of the Center for the Occupational Robotics Research (CORR), and the Team Lead of the Safety Control Team at the National Institute for Occupational Safety and Health. His research interests include operation safety of robots in workspaces, human-robot interaction, control system, and cyberphysical systems used for human-robot collaboration. He leads the Robotic Research Laboratory in Morgantwon, WV, which investigates operation strategies for robots in various workspaces and mobile sensor networks.
- Company: CDC/NIOSH
- Job title: Assistant Coordinator / Team Lead
- Education: PhD of Mechanical Engineering
- School: Purdue University, 2005
- Website: marvin-cheng.github.io
- Phone: 304.285.5787
- City: Morgantown, WV
Research and Lab News

Research Paper Published
February, 2026
Our study, titled "Robot-Related Workers’ Compensation Claims in Ohio, 2001–2020," published in the American Journal of Industrial Medicine, investigates 1,076 robot-related claims spanning two decades. Findings indicate that 85% were medical-only claims, involving either medical care alone or seven or fewer days away from work. This research expands upon existing robot-related injury literature by analyzing the largest dataset of its kind to date.
Best Oral Presentation Award
September, 2025
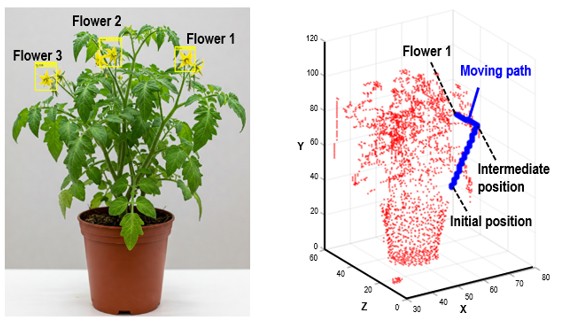
Our study, titled "Pollination Process with a Collaborative Robotic Platform," received the Best Oral Presentation Award in the 2nd International Online Conference on Biomimetics. The research team would like to express its sincere gratitude to the students from Morgantown High School for their participation in data collection and their valuable contributions to this study.

Research Paper Published on American Journal of Industrial Medicine
June, 2025
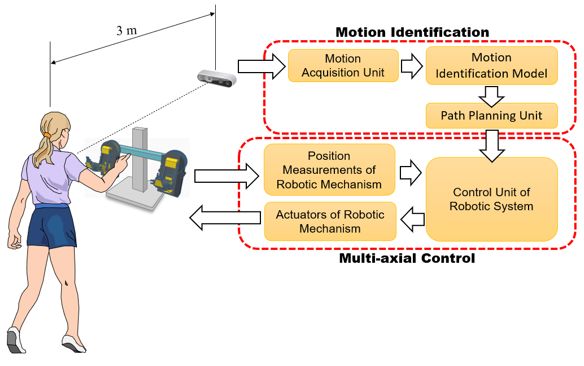
Our manuscript, titled "Bio-Inspired Motion Emulation for Social Robots: A Real-Time Trajectory Generation and Control Approach," has been published in Biomimetics. This paper explores the implementation of motion trajectories for a dual-arm humanoid robot, synthesized from real human movements.

Research Paper Published on Biomimetics
September, 2024
Our manuscript, titled "Bio-Inspired Motion Emulation for Social Robots: A Real-Time Trajectory Generation and Control Approach," has been published in Biomimetics. This paper explores the implementation of motion trajectories for a dual-arm humanoid robot, synthesized from real human movements.
Experiences
Education
Ph.D. of Mechanical Engineering
1999 - 2005
Purdue University, West Lafayette, IN
Master of Mechanical Engineering
1994 - 1996
National Sun Yat-sen University, Kaohsiung, Taiwan
Bachelor of Engineering
1990 - 1994
National Sun Yat-sen University, Kaohsiung, Taiwan
Professional Experience
Mechanical Engineer / Coordinator
2018 - Present
NIOSH, Morgantown, WV
- Coordinator of the Center for Occupational Robotics Research
- Team lead of the Safety Control Team (SCT)
- Member of o ANSI/A3 Standard Committee Member (R15.06 Safety Requirements for Industrial Robots and Robot Systems)
- Member of o ANSI/A3 Standard Committee Member (R15.08 Safety Requirements for Industrial Mobile Robots and Robot Systems)
Co-Chair / The Networking and Information Technology Research and Development (NITRD) Program
2024 - Present
Intelligent Robotics and Automation Systems (IRAS) Interagency Working Group (IWG)
Associate Professor
2017 - 2018
Embry-Riddle Aeronautical University, Daytona Beach, FL
Assistant Professor
2010 - 2017
West Virginia University, Morgantown, WV

{kind=link}
Recent Publications and Invited Seminars
Recent Journal Publications (since 2024)
 Robot-Related Workers' Compensation Claims in Ohio, 2001-2020
Robot-Related Workers' Compensation Claims in Ohio, 2001-2020
V. Suresh, S. Konda, J. Haney, H.E. Camargo, M. H. Cheng, D. Weaver, S. J. Wurzelbacher, A. R. Meyers, S. Naber, and M. Lampl
American Journal of Industrial Medicine, vol.69, no.3, 2026
Exploring the Role of Digital Twin Systems in Mine Safety
M. H. Cheng, J. Carr, B. Bissonette, R. Knuth, and E. J. Hass
Mining Engineering, vol.77, no.10, 2025
Industrial Robotics and the Future of Work
J. Howard, V. Murashov, J. Carr, M. H. Cheng, G. S. Earnest, K. C. Elliot, E. J. Hass, G. Petery, C. R. Reid, P. O. Spielholz, D. Srinivasan, D. Troun, C.-J. Liang, G. Roth, and C. D. Wendt
American Journal of Industrial Medicine, vol.68, no.6, 2025
Bio-Inspired Motion Emulation for Social Robots: A Real-Time Trajectory Generation and Control Approach
M.H. Cheng, P.-L. Huang, and H.-C. Chu
Biomimetics, vol. 9, no. 9, 557, 2024
Designing an Experimental Platform to Assess Ergonomic Factors and Distraction Index in Law Enforcement Vehicles during Mission-Based Routes
M.H. Cheng, J. Guan, H.K. Dave, R.S. White, R.L. Whisler, J.V. Zwiener, H.E. Camargo, and R.S. Current
Machines, vol. 12, no. 8, 502, 2024
Ethics of Artificial Intelligence and Robotics in the Architecture, Engineering, and Construction Industry
C.-J. Liang, T.-H. Le, Y. Ham, B.R.K. Mantha, M. H. Cheng, and J.J. Lin
Automation in Construction, vol.162, 105369, 2024
Invited Seminars
 Human-Robot Collaboration through Machine Learning
Human-Robot Collaboration through Machine Learning
NIOSH Signatures Series on AI, On-Line Webinar
September 30, 2025
Robotics Taking Over the Workplace: Part 1
American Society of Safety Professionals, On-Line Webinar
December 10, 2024
Human-Robot Collaboration in Construction
2024 NORA Construction Sector Council Meeting, Washington DC
November 20-21, 2024
ASME/IMECE 2023: Human-Robot Collaboration & AI Integration Workshop / Panel: Risk and Safety for HRC
ASME/IMECE 2023, New Orleans, LA
November 2, 2023
Human-Robot Collaboration in Future Manufacturing Workspaces: Enhancing the Safety and Efficiency
HFES/The 9th ErgoX Symposium, Washington DC
October 23, 2023
Smart Technology for Reducing Occupational Injuries in the Construction Industry
U.S. National Institute for Occupational Safety and Health and Taiwan Institute of Labor, Occupational Safety and Health Video Conference Meeting, Virtual
October 4, 2023
Teaching Experiences
Courses Taught
Undergraduate Courses
- Statics
- Dynamics
- Control Systems
- Mechatronics
- Robotics
Graduate Courses
- Advanced Vibrations
- Linear Control
- Nonlinear Control Systems
- Mechatronics
- Embedded Systems
Student Research Team
NASA Centennial Challenges: Sample Robot Return Challenge (2014~2016)
The student research team at West Virginia University achieved a remarkable milestone by successfully guiding their robot, Cataglyphis, to earn 11 points and secure first place in the Level 2 competition of NASA’s Sample Return Robot Challenge, part of the Centennial Challenges program. Their outstanding performance earned a $750,000 prize—the largest ever awarded in the five-year history of the Challenge.
Teaching Awards
Outstanding Teacher Award
2016, Statler College of Engineering and Mineral Resources, West Virginia University
The George W. Weaver Award, Excellent Teaching
2015, Department of Mechanical and Aerospace Engineering , West Virginia University
The Magoon Teaching Assistant Award
2005, Outstanding Graduate Student for Excellence in Teaching, Purdue University