

Tracking Control Design and Implementation of Multiaxial Controller for Robotic Devices
In the recent years, robotic devices have been widely used to interact with human beings in various scenarios, including healthcare, education, tourism, and manufacturing applications. These applications of robotic devices have also been expanded to many social activities. These social robots can take the form of a traditional mobile robot or a humanoid system that provide one-on-one interaction. Among different types of robotic devices, the bio-inspired humanoid robotics has received extensive attention in therapeutic settings by providing psychological and physiological benefits. With the social benefits, humanoid type of social robots can be an important tool to assist people in many different situations.
To allow social robotic devices to better interact with human being, it is desired that these robotic systems can identify on-going human motions and respond to the motions by mimicking human movements. Thus, these systems need to acquire human motions and predict the types of these movements in real-time. Such a technique has been investigated by various research groups. Once the human motions have been identified, corresponding reactions of the robots can be determined accordingly, which usually requires the involved joints to move along specific trajectories. To synthesize such an interactive robotic system, a platform of a multi-axial robotic device, a motion identification model of human motions, a reference generator based on the identified motions, the sensors used for real-time motion measurements, and an adequate control strategy need to be integrated as a single system. The major bottleneck of such a system is that the processing and control units might not be efficient enough and can cause dramatic legacy. To validate the overall process, a simplified system was developed to investigate the feasibility of such an interactive robotic system.
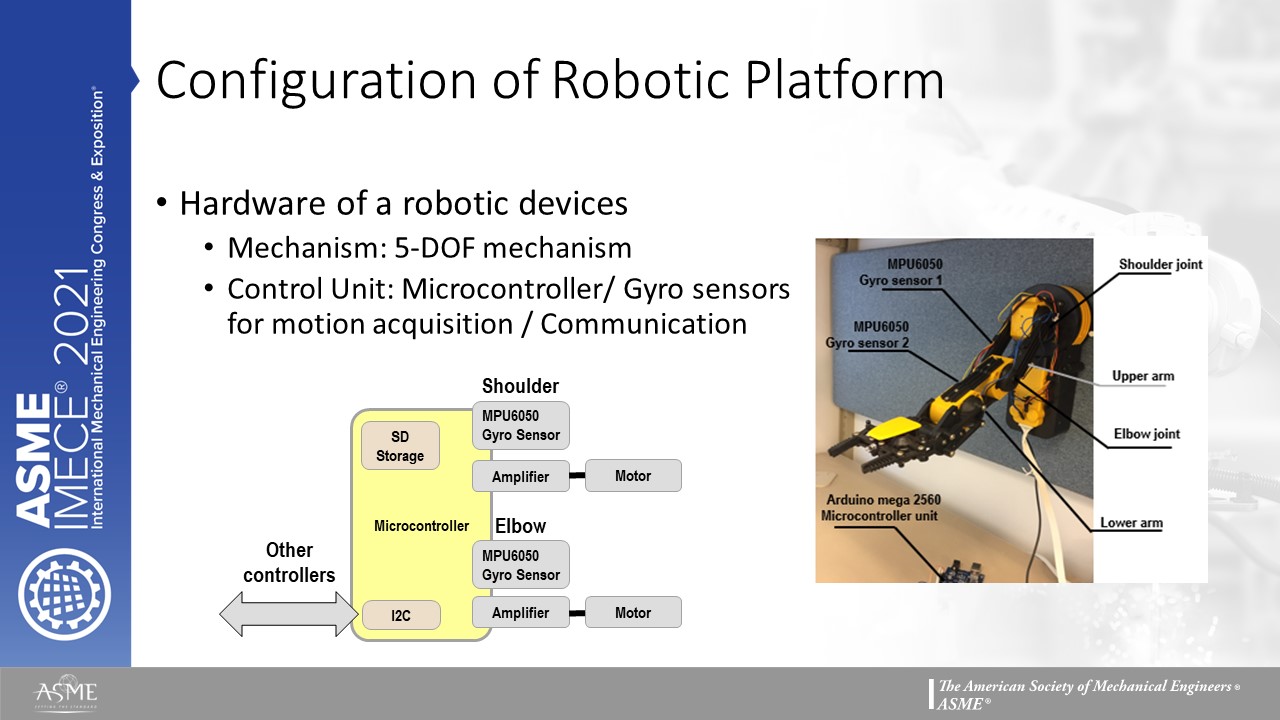
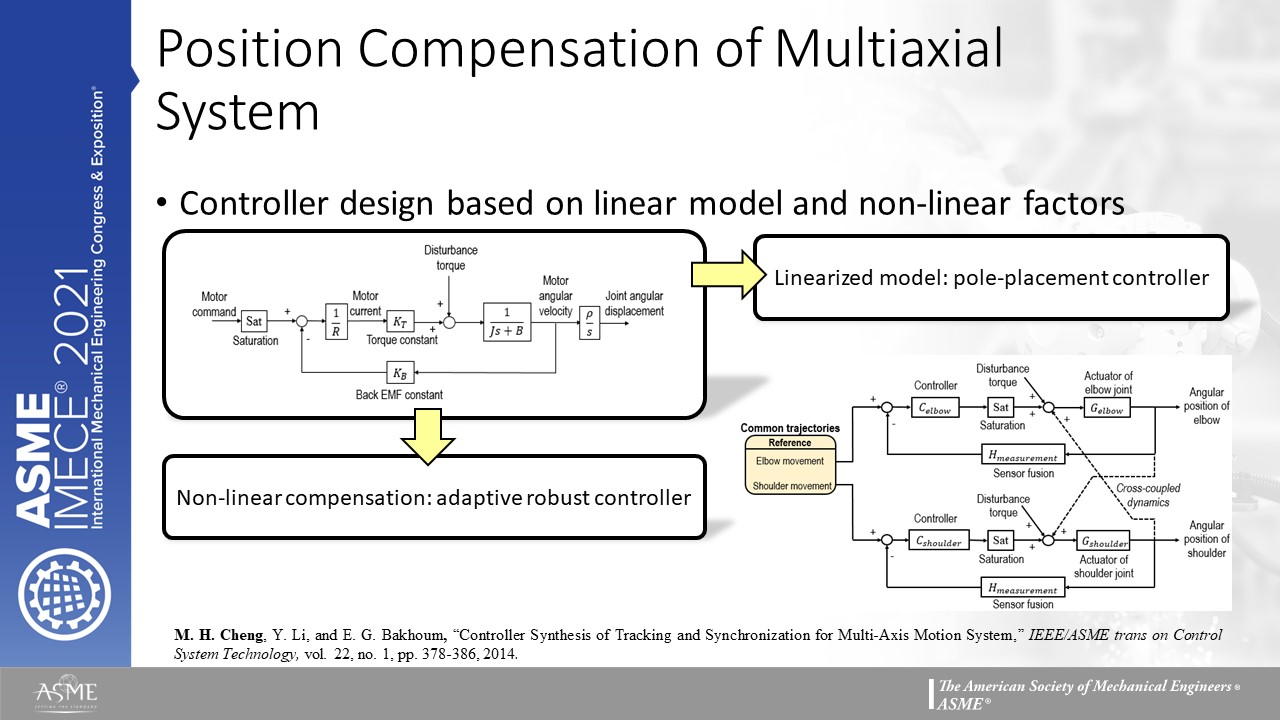
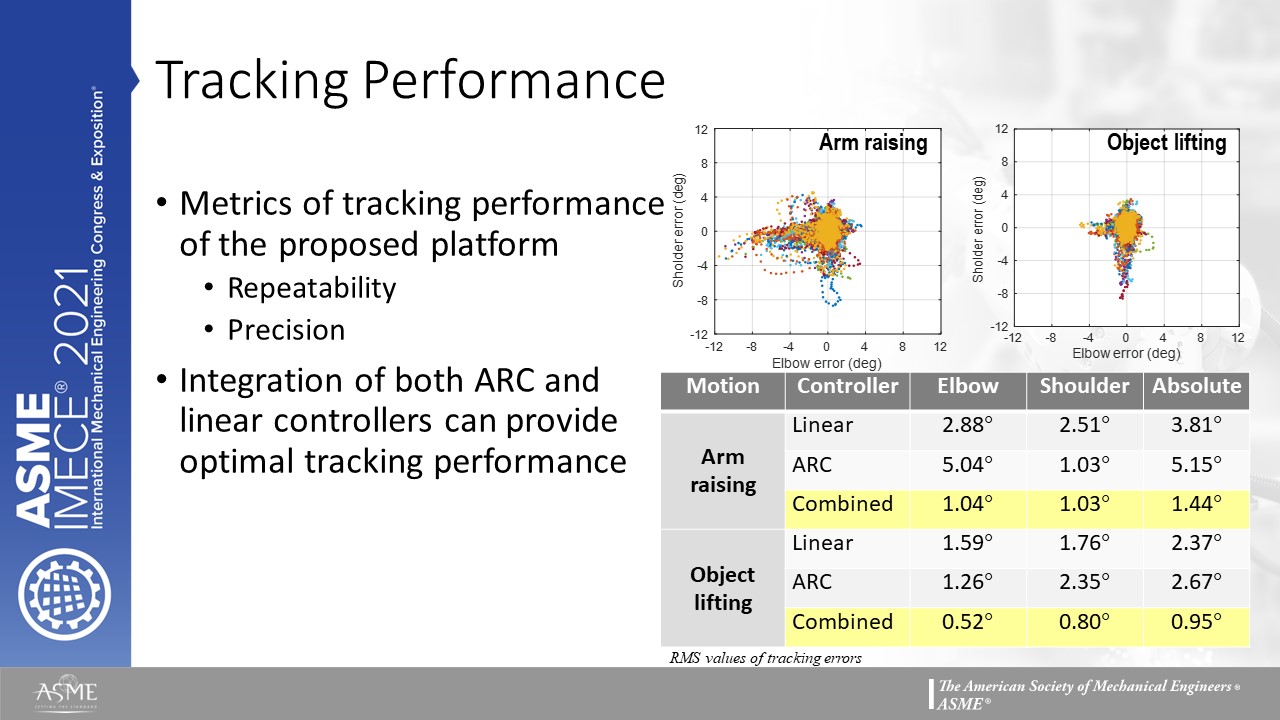
In this study, an experimental multi-axial robotic arm was adopted. A developed motion identification model was used to determine the on-going motions of the interacting person. Once the motion being identified, the responding motion of robotic device can be determined based on a pre-selected motion library. The trajectories of individual joints of the robotic arm can then also be generated accordingly. The robotic arm was then following the pre-selected trajectories for corresponding interactions. To compensate for the nonlinear factors caused by existing mechanical/electrical components and the cross-coupled dynamics among the mechanical components, a control strategy that integrates an adaptive robust control method and a linear controller for motion tracking was applied. With the proposed control scheme, an adequate controlled outcome can be achieved.