
Safe Operations of Construction Robots on Human-Robot Collaborative Construction Sites
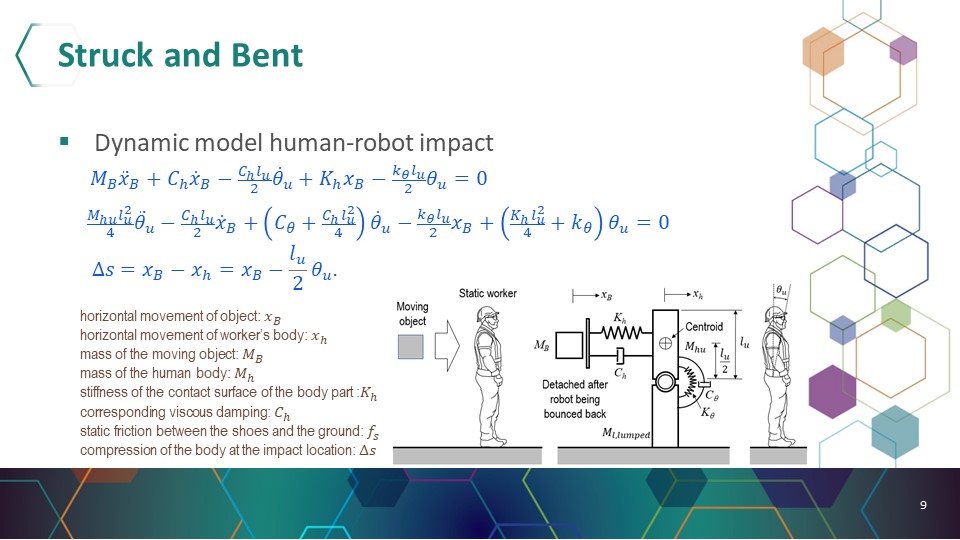
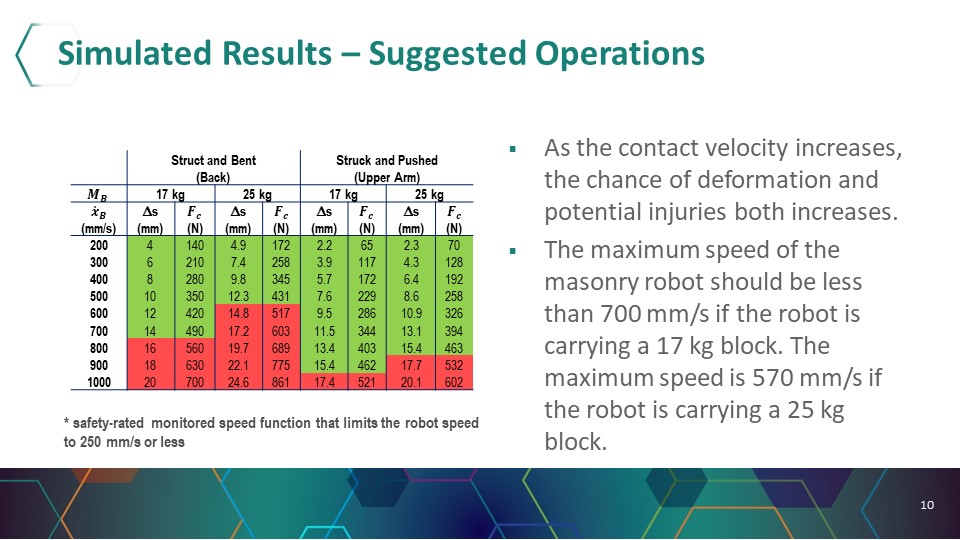
Construction robots have become essential tools on a variety of jobsites. These devices can be revolutionary tools for improving construction efficiency and reducing musculoskeletal disorders and traumatic injuries. However, this innovative technology comes with corresponding dangers and hazards if a robot is not operated properly. Construction workers can be injured by unexpected contact. Therefore, construction robots need to be operated under specific safety procedures to prevent workers from being injured. In this study, a mechanical approach was proposed to derive the dynamic models of unexpected contact during human-robot interaction. With the dynamic models, contact forces and deformations of body parts of human workers can be estimated. The estimated results can be used as reference values to help safety engineers or others to adjust the operations in different scenarios on the construction jobsite for improved safety.