

Contact Avoidance and Path Planning for Robotic Systems
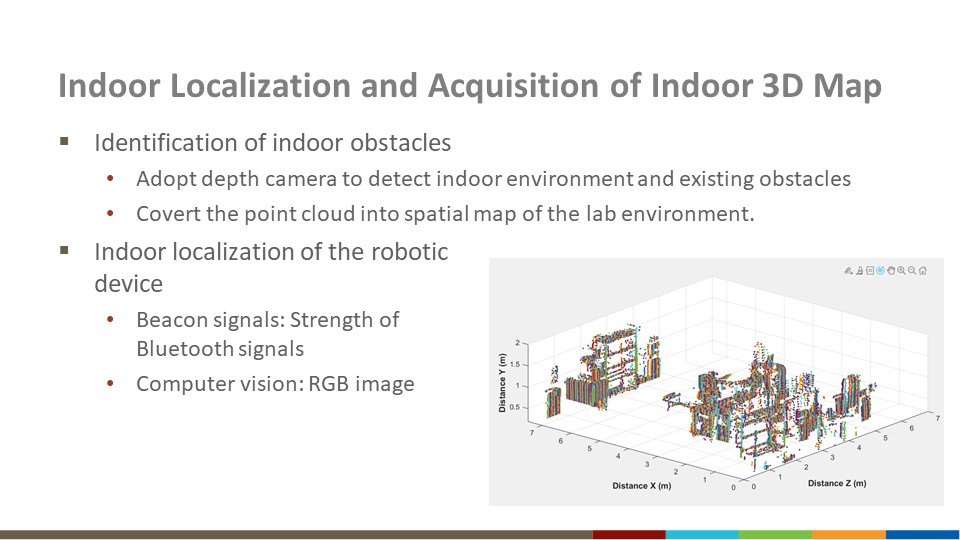
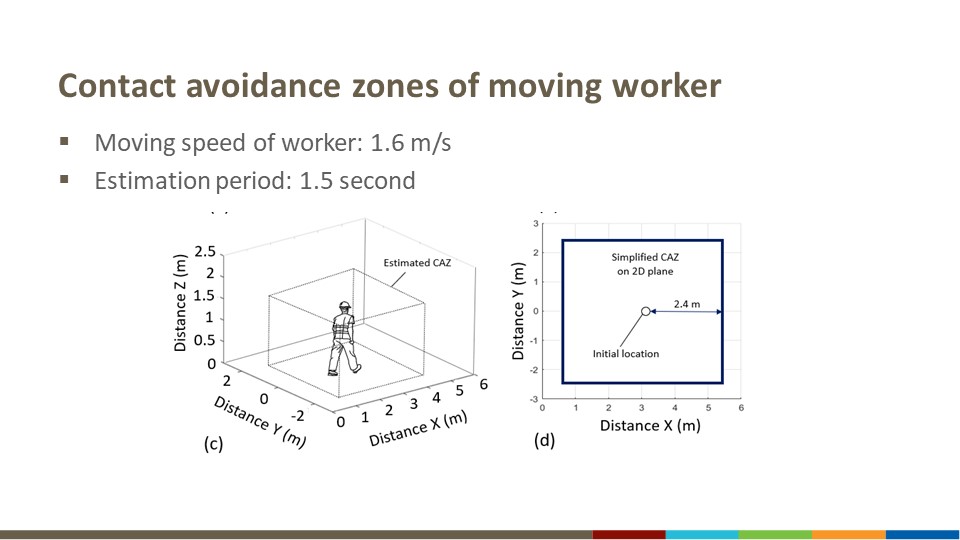
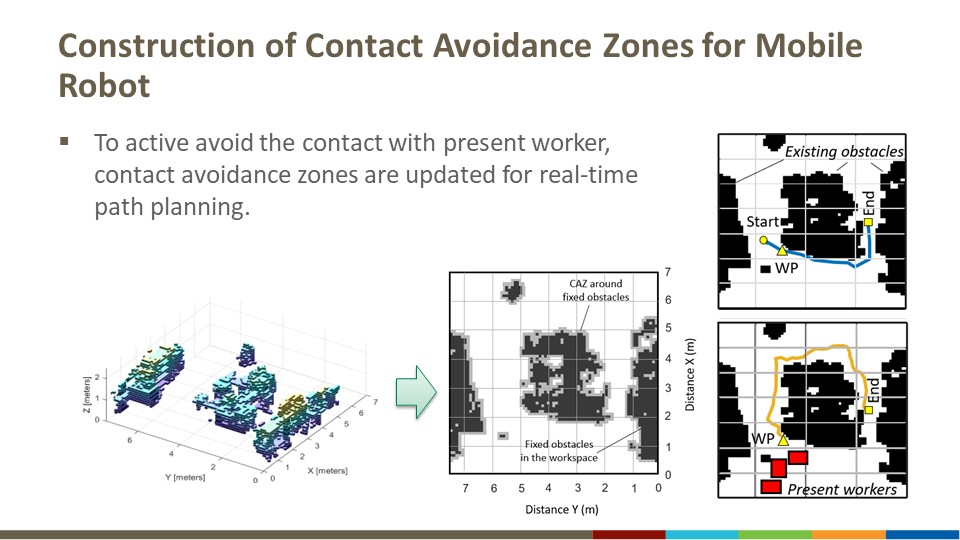
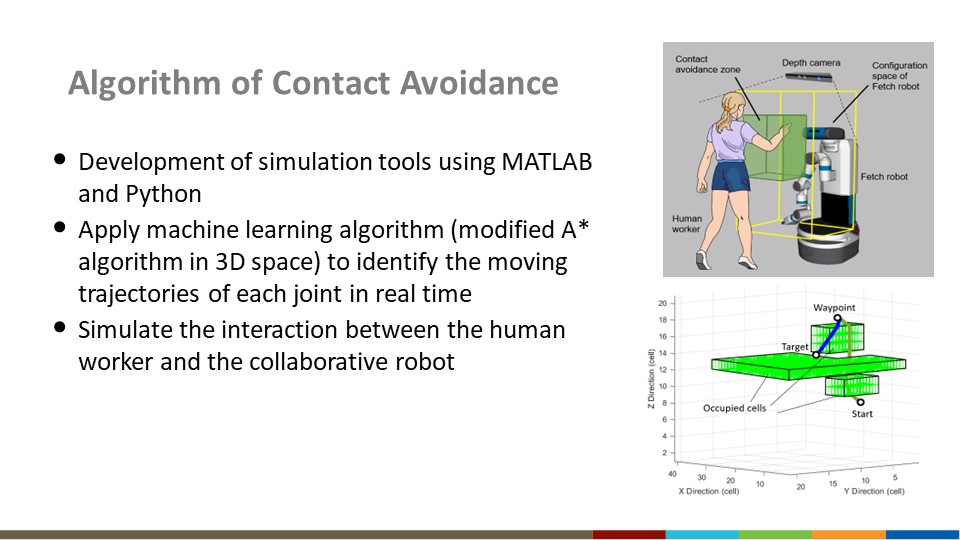
The objective of this study was to establish a framework for producing indoor maps and locating robotic devices in a manufacturing environment. The framework employs computer vision techniques to construct the map and identify the presence of human workers. It defines the contact avoidance zones around human workers and existing obstacles. Once the location of the robot is identified, the map is used to plan paths to ensure safe human-robot collaboration for mobile and collaborative robots in shared workspaces with humans. The incorporation of avoidance zones into the map allows the robotic devices to anticipate the movements of workers and prevent collisions, this decreases the risk of injuries in collaborative environments.