About Me

Marvin Cheng is a research engineer in the Center for Occupational Robotics Research at NIOSH. He is currently the Assistant Coordinator of the Center for the Occupational Robotics Research (CORR), and the Team Lead of the Safety Control Team at the National Institute for Occupational Safety and Health. His research interests include operation safety of robots in workspaces, human-robot interaction, control system, and cyberphysical systems used for human-robot collaboration. He leads the Robotic Research Laboratory in Morgantwon, WV, which investigates operation strategies for robots in various workspaces and mobile sensor networks.
- Company: CDC/NIOSH
- Job title: Coordinator / Team Lead
- Education: PhD of Mechanical Engineering
- School: Purdue University, 2005
- Website: marvin-cheng.github.io
- Phone: 304.285.5787
- City: Morgantown, WV
Research and Lab News

Research Paper Published on American Journal of Industrial Medicine
April, 2025
Our manuscript, titled "Industrial Robotics and the Future of Work," has been accepted by American Journal of Industrial Medicine. This paper discusses how robotic devices and platforms are used by various industries and how future industries can be shaped by innovative robots.

Research Paper Published on Biomimetics
September, 2024
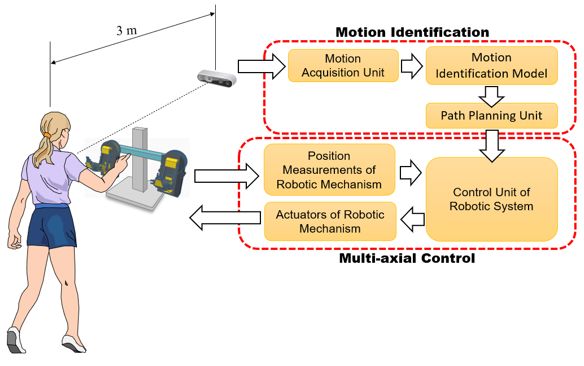
Our manuscript, titled "Bio-Inspired Motion Emulation for Social Robots: A Real-Time Trajectory Generation and Control Approach," has been published in Biomimetics. This paper explores the implementation of motion trajectories for a dual-arm humanoid robot, synthesized from real human movements.
New Funded Research Project: Enhancing Worker Safety and Efficiency in Human-Robot Collaboration through Machine Learning
Augest, 2024
Our research team has been awarded funding for a groundbreaking research project aimed at enhancing safety in human-robot interactions within the manufacturing industry by NIOSH. The project will utilize data from non-contact and wearable sensors, combined with machine learning methods, to develop predictive models that identify safe distances between workers and robots. By analyzing previously collected motion data and applying psychometric functions, the research seeks to quantify human behaviors in response to robots’ operational conditions, ultimately creating a safer and more productive environment for human-robot collaboration.
As the use of collaborative and mobile robots rapidly increases in manufacturing, this research is crucial for addressing the emerging safety challenges. NIOSH's expertise in worker safety and active participation in safety standards committees will ensure that the findings from this project directly contribute to the development of industry guidelines, supporting safer, more efficient workplaces as automation continues to evolve.

Research Paper Published on Machines
July, 2024
Our manuscript titled "Designing an Experimental Platform to Assess Ergonomic Factors and Distraction Index in Law Enforcement Vehicles during Mission-Based Routes" has been published on Machines. This paper discusses the development of a driving simulation environment for LEOs using Project Chrono and a machine learning-based model to evaluate the distraction index. The platform aims to investigate the layout of DVIs for creating a safer driving environment for LEOs on mission-based routes.
Research Paper Accepted by ASME IMECE 2024
June, 2024
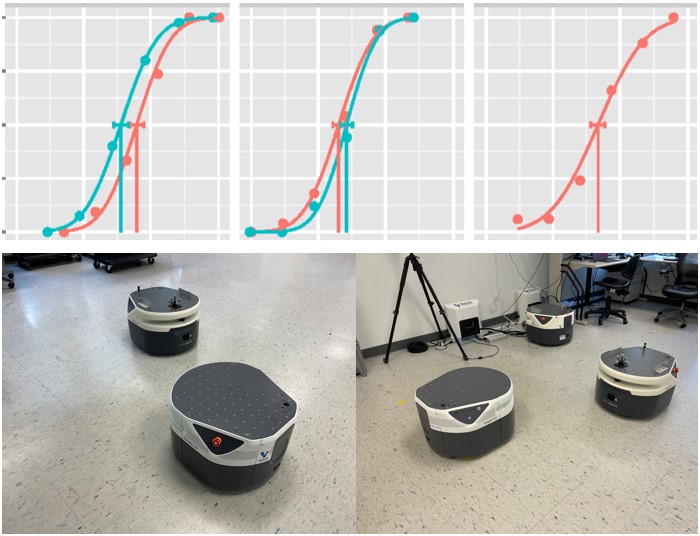
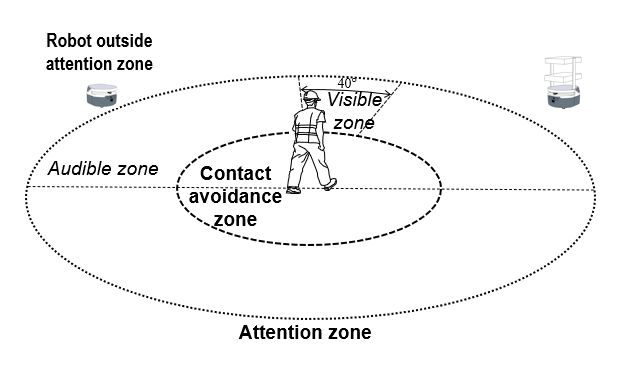
Our manuscript titled "Enhancing Safety in Collaborative Workspaces: Defining Attention and Avoidance Zones Using Path Planning with Mobile Robotic Systems" has been accepted by ASME's International Mechanical Engineering Congress & Exposition (IMECE) 2024. This paper addresses the critical challenge of preventing collisions between mobile robots and human workers in collaborative workspaces. By proposing a comprehensive solution that integrates attention zones and avoidance zones into path planning for mobile robots, we have taken a significant step toward enhancing workplace safety. This study also introduces a methodology for delineating attention zones for human workers and avoidance zones for robots during navigation, thereby enabling effective path planning to prevent potential collisions and minimize the risk of injuries. Various factors influencing the design and implementation of these zones was explored, including environmental conditions, human factors, and technological considerations, to develop robust safety protocols.
Research Paper Nominated as the Top 12 in ISARC 2024
June, 2024
We are proud to announce that our research paper titled "Safe Operations of Construction Robots on Human-Robot Collaborative Construction Sites," authored by Dr. Cheng, Dr. Liang, and Ms. Doiminguez, has been nominated as one of the top 12 best papers at the International Symposium on Automation and Robotics in Construction (ISARC) 2024. Dr. Liang attended the conference and presented this significant work as a keynote speaker on June 4th. This recognition highlights the critical advancements in ensuring safety in human-robot collaborative environments on construction sites. Congratulations to Dr. Cheng and his team on this prestigious achievement!
Experiences
Education
Ph.D. of Mechanical Engineering
1999 - 2005
Purdue University, West Lafayette, IN
Master of Mechanical Engineering
1994 - 1996
National Sun Yat-sen University, Kaohsiung, Taiwan
Bachelor of Engineering
1990 - 1994
National Sun Yat-sen University, Kaohsiung, Taiwan
Professional Experience
Mechanical Engineer / Coordinator
2018 - Present
NIOSH, Morgantown, WV
- Coordinator of the Center for Occupational Robotics Research
- Team lead of the Safety Control Team (SCT)
- Member of o ANSI/A3 Standard Committee Member (R15.06 Safety Requirements for Industrial Robots and Robot Systems)
- Member of o ANSI/A3 Standard Committee Member (R15.08 Safety Requirements for Industrial Mobile Robots and Robot Systems)
Co-Chair / The Networking and Information Technology Research and Development (NITRD) Program
2024 - Present
Intelligent Robotics and Automation Systems (IRAS) Interagency Working Group (IWG)
Associate Professor
2017 - 2018
Embry-Riddle Aeronautical University, Daytona Beach, FL
Assistant Professor
2010 - 2017
West Virginia University, Morgantown, WV


Recent Publications and Invited Seminars
Recent Journal Publications (since 2023)
 Industrial Robotics and the Future of Work
Industrial Robotics and the Future of Work
J. Howard, V. Murashov, J. Carr, M. Cheng, G.S. Earnest, K.C. Elliott, E.J. Haas, G. Petery, C.R. Reid, P.O. Spielholz, D. Srinivasan, D. Trout, C.-J. Liang, G. Roth, and C.D. Wendt
American Journal of Industrial Medicine, accepted, 2025
Bio-Inspired Motion Emulation for Social Robots: A Real-Time Trajectory Generation and Control Approach
M.H. Cheng, P.-L. Huang, and H.-C. Chu
Biomimetics, vol. 9, no. 9, 557, 2024
Designing an Experimental Platform to Assess Ergonomic Factors and Distraction Index in Law Enforcement Vehicles during Mission-Based Routes
M.H. Cheng, J. Guan, H.K. Dave, R.S. White, R.L. Whisler, J.V. Zwiener, H.E. Camargo, and R.S. Current
Machines, vol. 12, no. 8, 502, 2024
Ethics of Artificial Intelligence and Robotics in the Architecture, Engineering, and Construction Industry
C.-J. Liang, T.-H. Le, Y. Ham, B.R.K. Mantha, M. H. Cheng, and J.J. Lin
Automation in Construction, vol.162, 105369, 2024
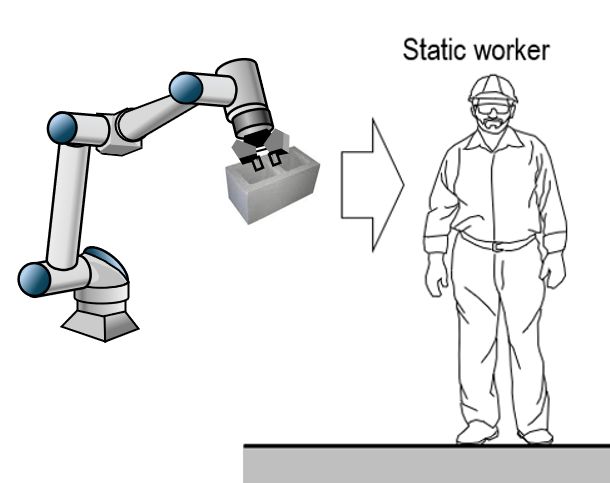
Identification of Contact Avoidance Zones of Robotic Devices in Human-Robot Collaborative Workspaces
M. H. Cheng, C.-J. Liang, E.A. McKenzie, E. G. Dominguez
IFAC-PapersOnLine, vol.56, no.3, pp. 577-582, 2023
Sustainable Energy Harvesting Mechanism with Flow-Induced Vibration
M.H. Cheng, Y. Li, H. Camargo, and E.G. Bakhoum
Machines, vol. 11, no. 9, 902, 2023
Trends in Robotics Research in Occupational Safety and Health: A Scientometric Analysis
C.-J. Liang and M. Cheng
International Journal of Environmental Research and Public Health, vol. 20, no. 10, 5904, 2023
Using iBeacon Components to Design and Fabricate Low-Energy and Simple Indoor Positioning Method
C.-Y. Chen, M.-H. Cheng, M. Cheng, and C.-F. Yang
Sensors and Materials, vol. 35, no. 3, pp. 703-722, 2023
Invited Seminars
 Robotics Taking Over the Workplace: Part 1
Robotics Taking Over the Workplace: Part 1
American Society of Safety Professionals, On-Line Webinar
December 10, 2024
Human-Robot Collaboration in Construction
2024 NORA Construction Sector Council Meeting, Washington DC
November 20-21, 2024
ASME/IMECE 2023: Human-Robot Collaboration & AI Integration Workshop / Panel: Risk and Safety for HRC
ASME/IMECE 2023, New Orleans, LA
November 2, 2023
Human-Robot Collaboration in Future Manufacturing Workspaces: Enhancing the Safety and Efficiency
HFES/The 9th ErgoX Symposium, Washington DC
October 23, 2023
Smart Technology for Reducing Occupational Injuries in the Construction Industry
U.S. National Institute for Occupational Safety and Health and Taiwan Institute of Labor, Occupational Safety and Health Video Conference Meeting, Virtual
October 4, 2023
Teaching Experiences
Courses Taught
Undergraduate Courses
- Statics
- Dynamics
- Control Systems
- Mechatronics
- Robotics
Graduate Courses
- Advanced Vibrations
- Linear Control
- Nonlinear Control Systems
- Mechatronics
- Embedded Systems
Student Research Team
NASA Centennial Challenges: Sample Robot Return Challenge (2014~2016)
The student research team at West Virginia University achieved a remarkable milestone by successfully guiding their robot, Cataglyphis, to earn 11 points and secure first place in the Level 2 competition of NASA’s Sample Return Robot Challenge, part of the Centennial Challenges program. Their outstanding performance earned a $750,000 prize—the largest ever awarded in the five-year history of the Challenge.
Teaching Awards
Outstanding Teacher Award
2016, Statler College of Engineering and Mineral Resources, West Virginia University
The George W. Weaver Award, Excellent Teaching
2015, Department of Mechanical and Aerospace Engineering , West Virginia University
The Magoon Teaching Assistant Award
2005, Outstanding Graduate Student for Excellence in Teaching, Purdue University